Hardware
Beyond software
Float:Drone
リアルタイム物体認識・追跡・回避ドローンシステム
 FIG.01 — ASSEMBLY
FIG.01 — ASSEMBLY
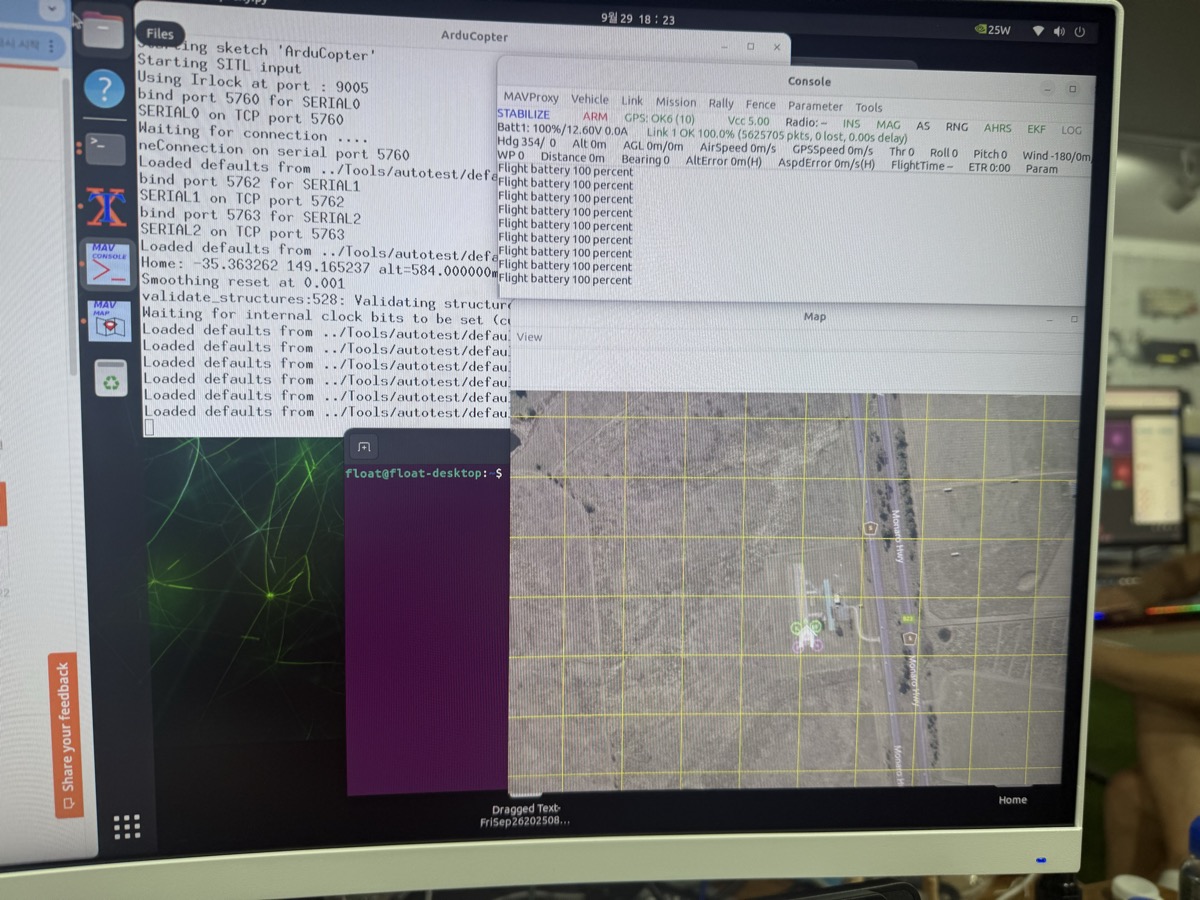 FIG.02 — FLIGHT CONTROL
FIG.02 — FLIGHT CONTROL
FLOAT:DRONEはJetsonベースのインテリジェント飛行プラットフォームで、カメラ映像とセンサーデータを利用して人・車両・建物・火災などをリアルタイムで検知し、対象を自動追跡したり障害物を回避する自律飛行システムです。
人・車両・施設を区別し位置座標を抽出
物体に固有IDを付与しフレーム間で継続追跡
一対多で社内者・社外者を識別
追跡対象の中心座標をPIDフィードバックで維持
前方障害物の距離をリアルタイム検知し回避
姿勢回転率と高度を一定に保つhover姿勢制御
リアルタイム映像ストリーミング+コマンド送受信
| メインボード | NVIDIA Jetson Orin Nano / Xavier NX |
| カメラモジュール | CSIまたはUSBカメラ(IMX219、IMX477など対応) |
| フレーム | S500カスタムフレーム(12インチ以上)+3Dプリントデザイン |
| フライトコントローラ | Pixhawk / Cube Orange(ArduPilotファームウェアベース) |
| サーボ/モーター | PCA9685 PWMボード(Python制御可能) |
| 通信 | Wi-Fi 5GHz / LTEモジュール(オプション)/ MAVLink + DroneKit / WebSocket |
| 電源 | 6Sリチウムポリマー+ソーラースナップ(開発中) |
Fire:Watch AI
リアルタイム火災・人物・物体(特定可能)認識AIシステム
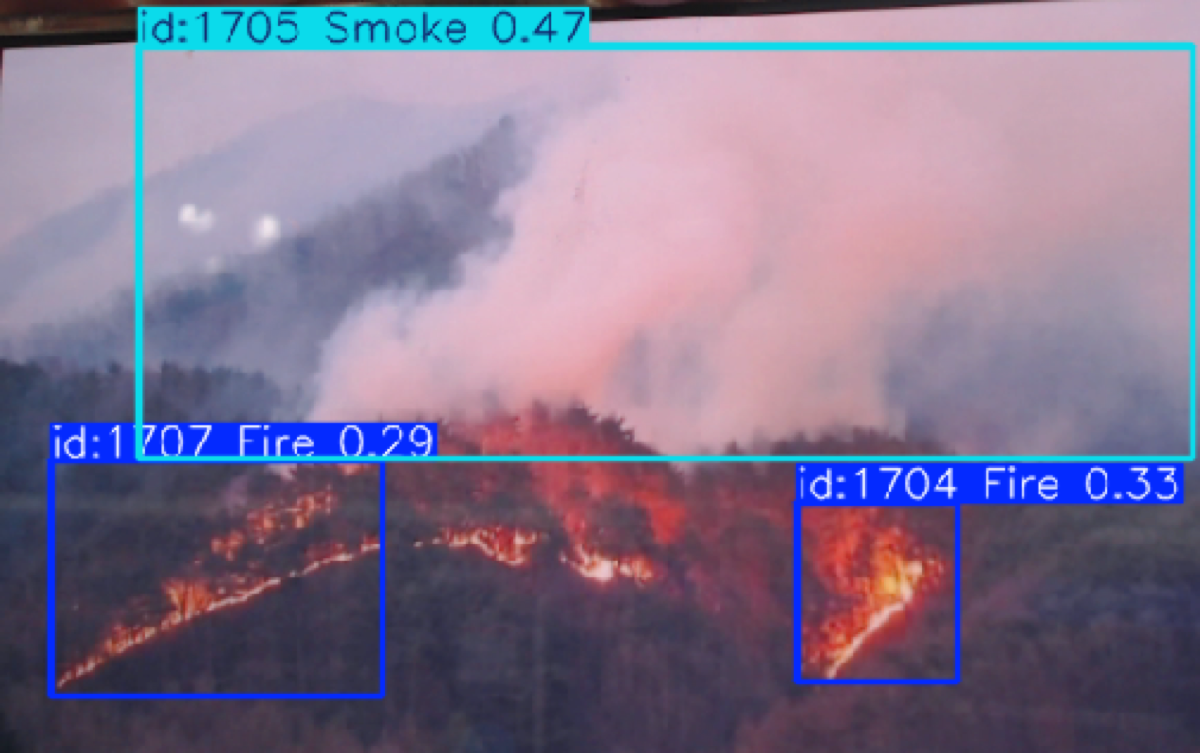 FIG.01 — YOLO DETECTION
FIG.01 — YOLO DETECTION
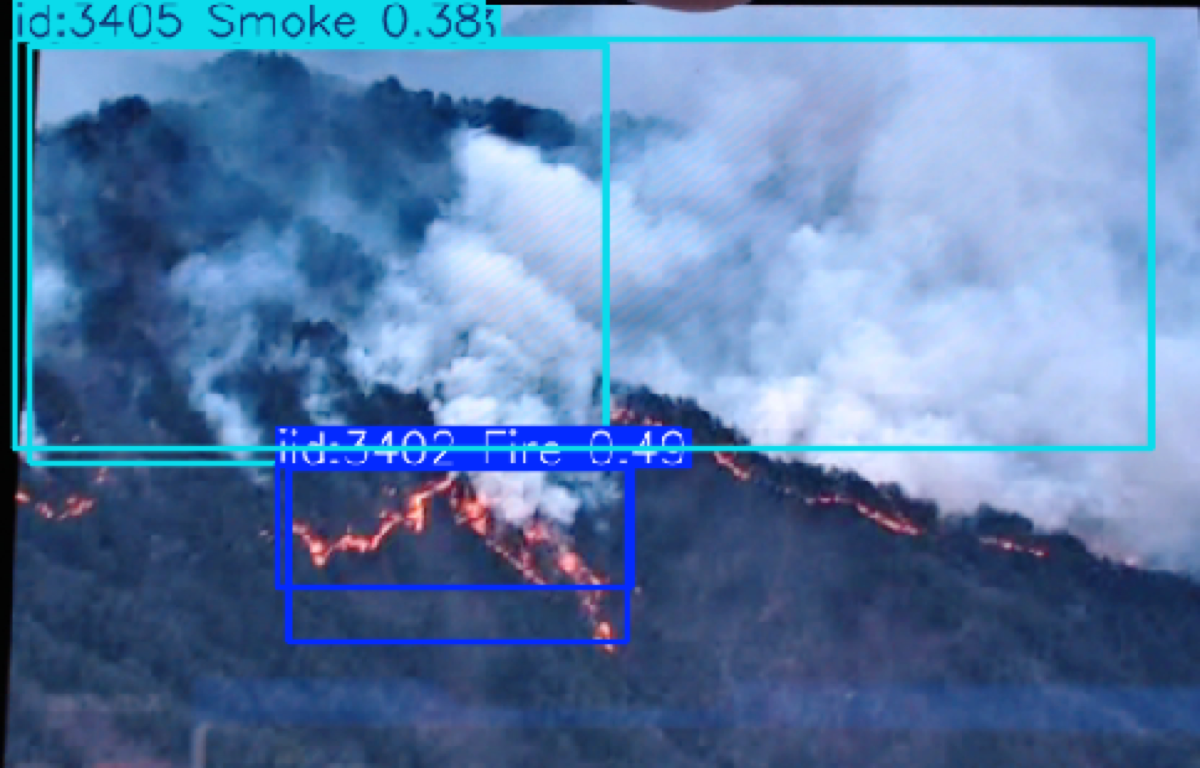 FIG.02 — SMOKE DETECTION
FIG.02 — SMOKE DETECTION
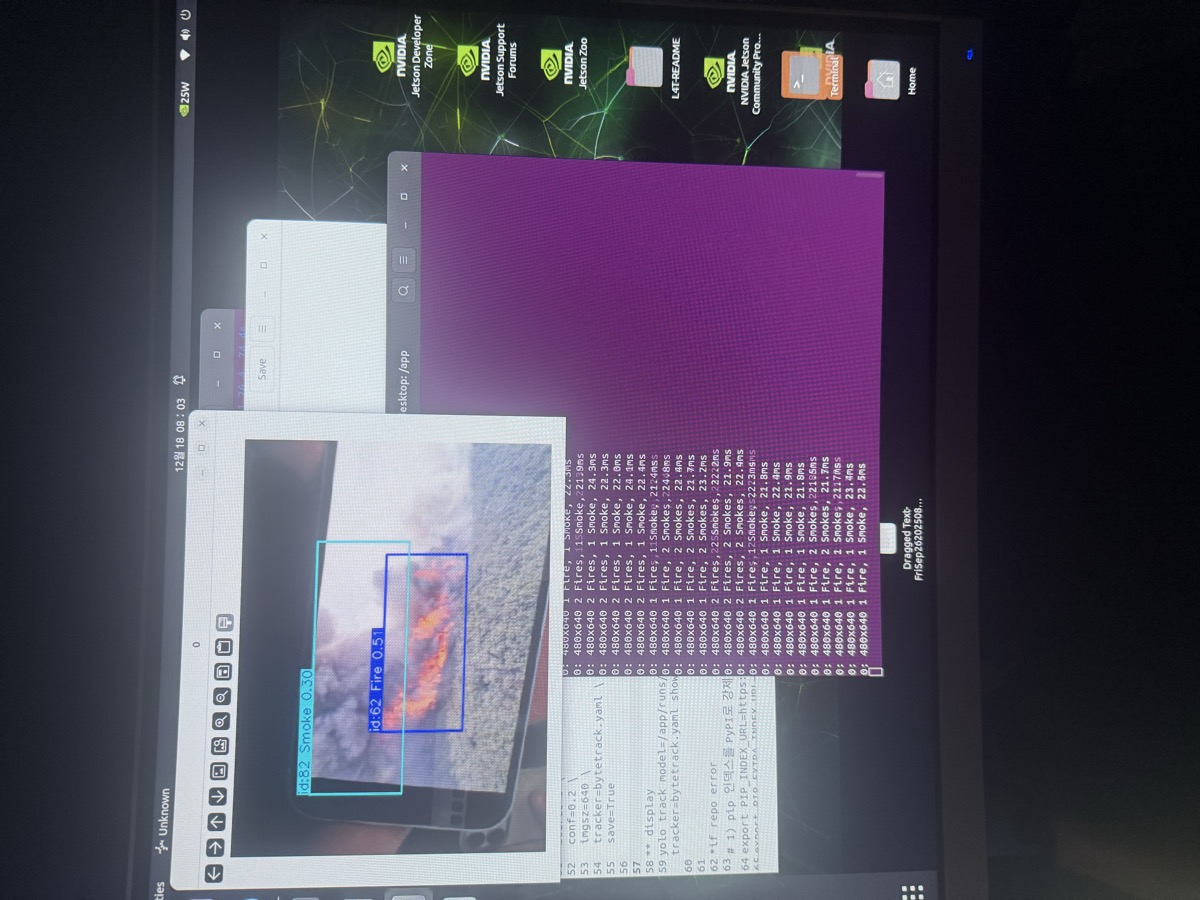 FIG.03 — EDGE INFERENCE
FIG.03 — EDGE INFERENCE
 FIG.04 — FIELD CAMERA
FIG.04 — FIELD CAMERA
YOLOベースのリアルタイム物体認識AIシステムです。火災(煙・炎)だけでなく、人物や物体(特定可能)も認識します。煙データセット5,000枚と韓国の正常な山・都市風景300枚を含む多様な学習データで訓練されています。エッジAIデバイスが現場のCCTV映像で物体を検知するとサーバーに送信し、サーバーは状況を判断して管制システムに即座にアラートを送信します。
CCTV映像から火災・人物・物体をリアルタイム検知し、バウンディングボックスと信頼度を出力
現場エッジデバイスでリアルタイム推論後、検知結果をサーバーへ即時送信
実際の火災有無、火災進行方向、消火優先度などを計算し管制室にアラート
雲・煙・誤検知などをAIが自動分類し、実際の火災のみラベリング
リアルタイム映像モニタリング、検知ログ、カメラ別設定および管理ダッシュボード
定期的な火災AI再学習による誤検知管理と精度向上
| エンジン | YOLO (You Only Look Once) |
| 学習データ | 煙画像5,000枚+韓国の山・都市正常画像300枚 |
| 検知クラス | Fire(炎)/ Smoke(煙)/ Person(人物)/ Object(物体) |
| 推論環境 | NVIDIA Jetsonエッジデバイス(現場)+GPUサーバー(バックエンド二重推論) |
| 管制システム | ウェブベースのリアルタイムモニタリングダッシュボード |