SCHEMATIC
Hardware
Beyond software
开发中
Float:Drone
实时目标识别·追踪·避障无人机系统
 FIG.01 — ASSEMBLY
FIG.01 — ASSEMBLY
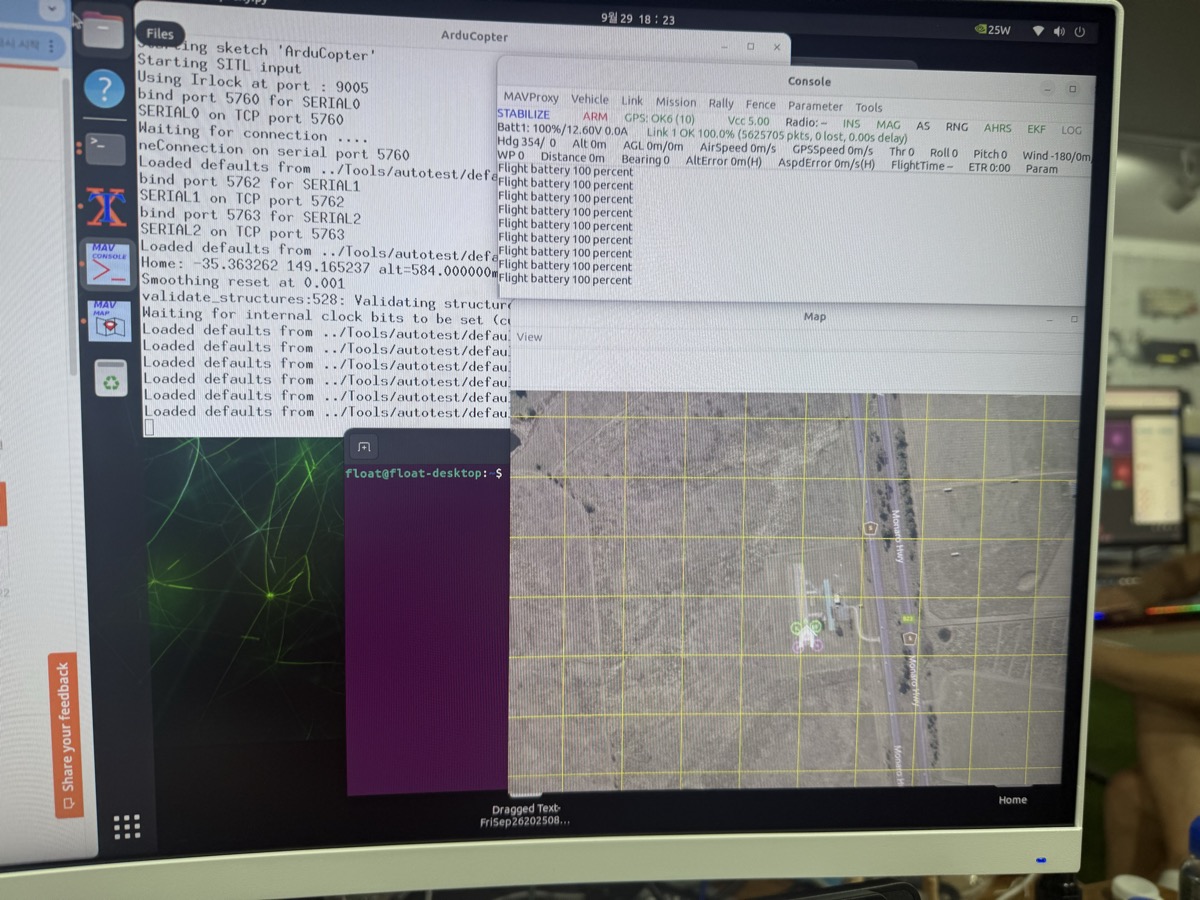 FIG.02 — FLIGHT CONTROL
FIG.02 — FLIGHT CONTROL
FLOAT:DRONE是基于Jetson的智能飞行平台,利用摄像头画面和传感器数据实时检测人、车辆、建筑、火灾等目标,并实现自动追踪或避障的自主飞行系统。
功能
01
目标检测
区分人、车辆、设施并提取位置坐标
02
目标追踪
为目标分配唯一ID并跨帧持续追踪
03
识别
一对多识别内部人员与外部人员
04
自主追踪飞行
通过PID反馈保持追踪目标的中心坐标
05
障碍物检测
实时检测前方障碍物距离并规避
06
hover保持
保持稳定的姿态旋转率和高度,实现hover姿态控制
07
实时流传输
实时视频流传输 + 指令收发
组件构成
| 主板 | NVIDIA Jetson Orin Nano / Xavier NX |
| 摄像头模块 | CSI或USB摄像头(支持IMX219、IMX477等) |
| 机架 | S500定制机架(12英寸以上)+ 3D打印设计 |
| 飞控 | Pixhawk / Cube Orange(基于ArduPilot固件) |
| 舵机/电机 | PCA9685 PWM板(可用Python控制) |
| 通信 | Wi-Fi 5GHz / LTE模块(可选)/ MAVLink + DroneKit / WebSocket |
| 电源 | 6S锂聚合物电池 + 太阳能模块(开发中) |
已部署
Fire:Watch AI
实时火灾·人员·物体(可识别)识别AI系统
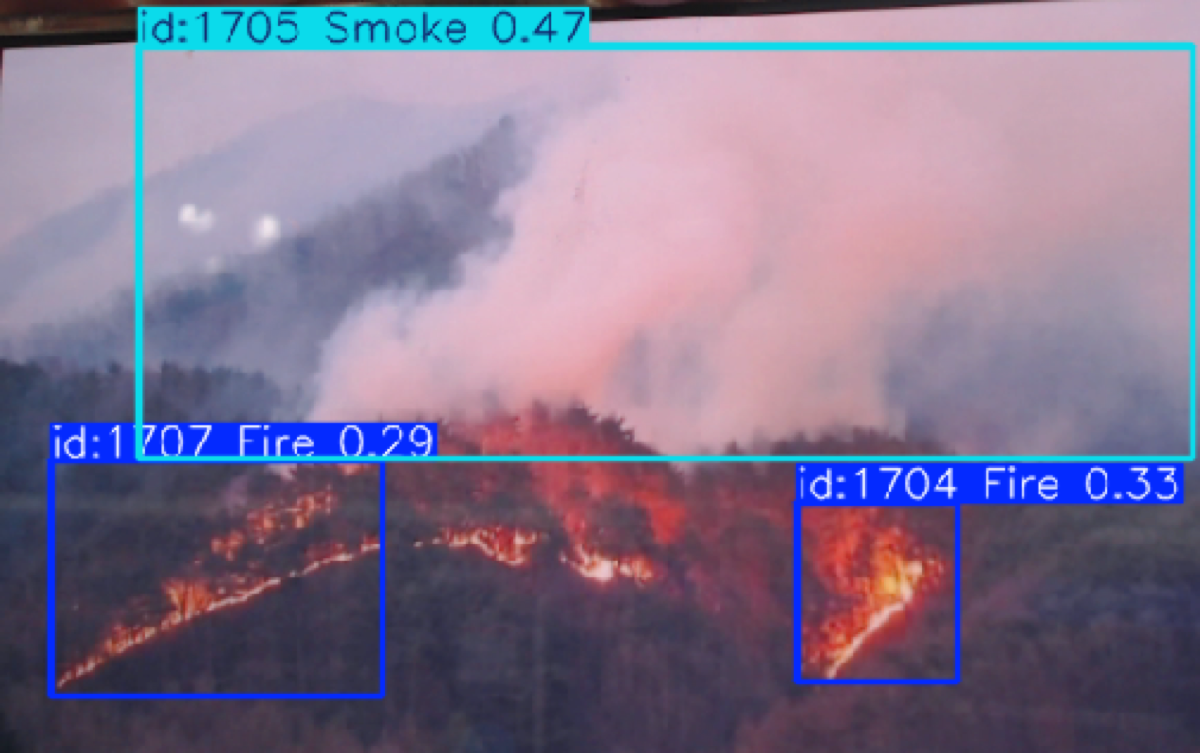 FIG.01 — YOLO DETECTION
FIG.01 — YOLO DETECTION
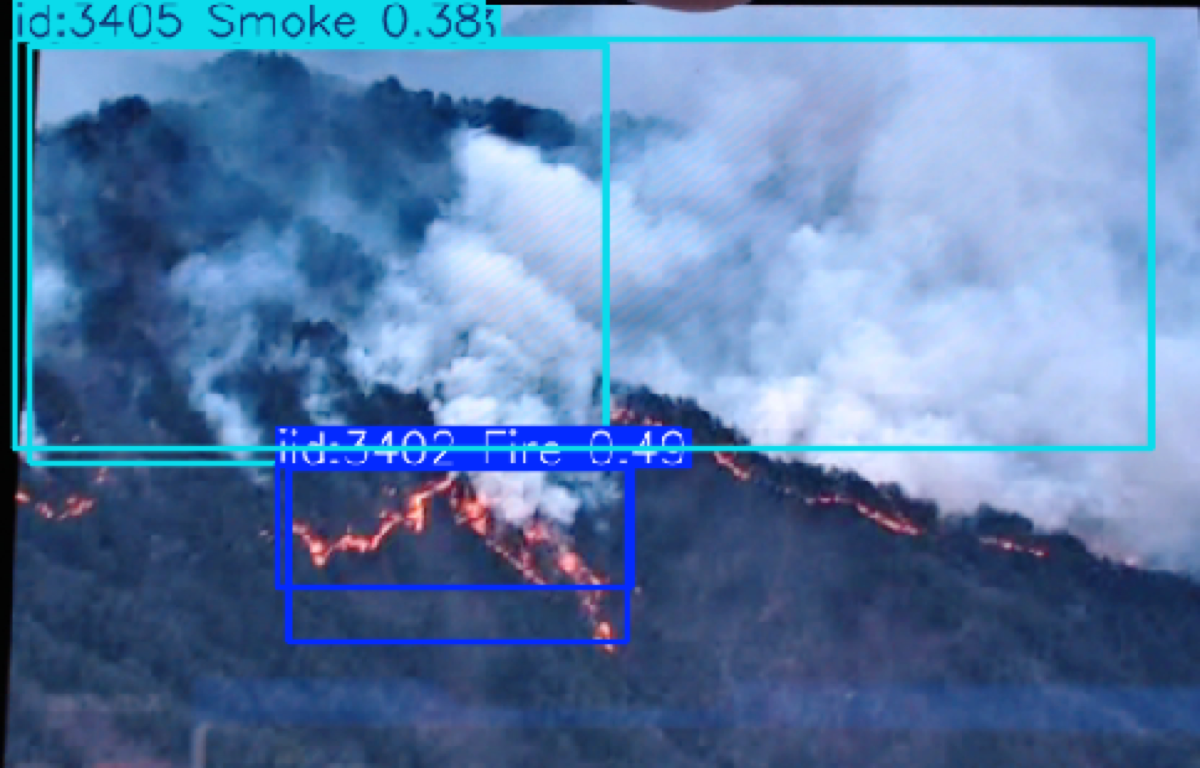 FIG.02 — SMOKE DETECTION
FIG.02 — SMOKE DETECTION
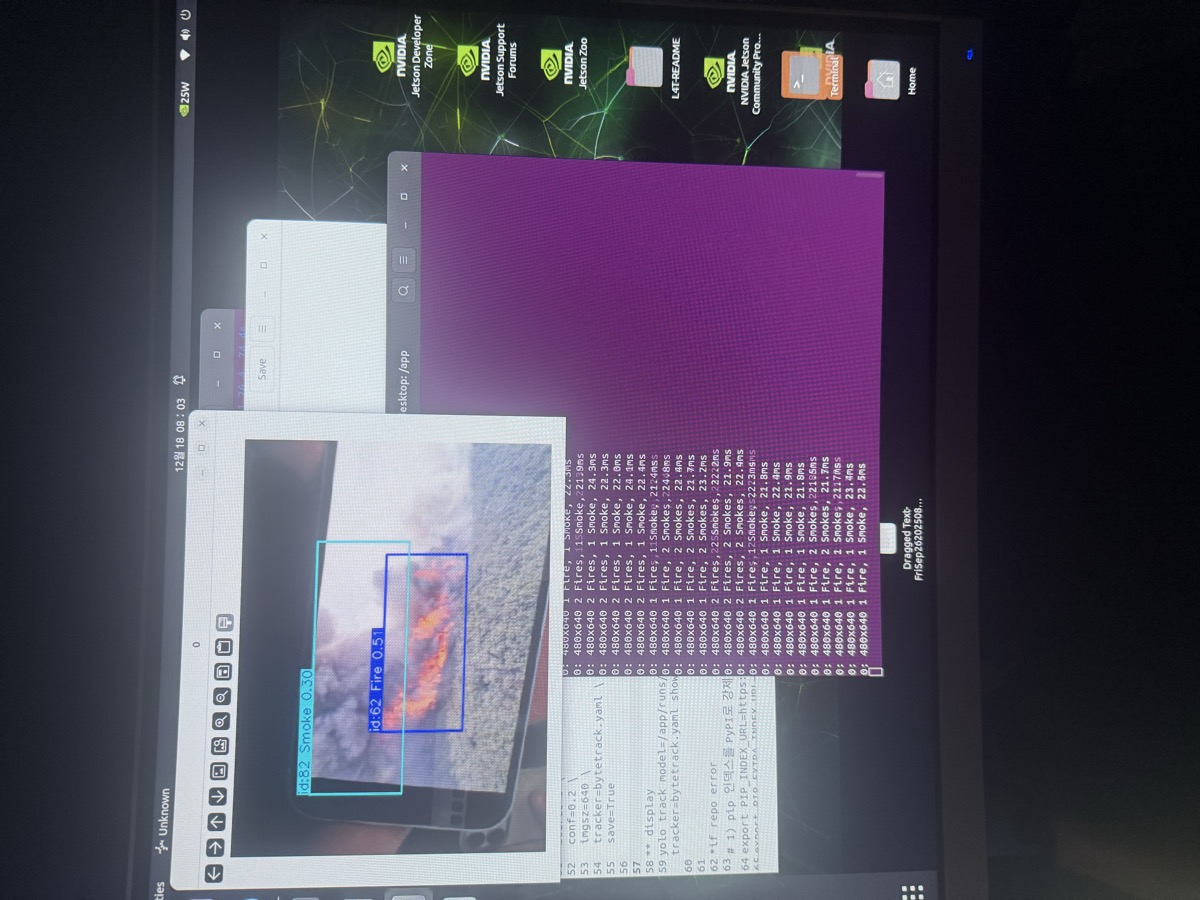 FIG.03 — EDGE INFERENCE
FIG.03 — EDGE INFERENCE
 FIG.04 — FIELD CAMERA
FIG.04 — FIELD CAMERA
基于YOLO的实时目标识别AI系统。不仅识别火灾(烟雾和火焰),还能识别人员和物体(可特定识别)。使用5,000张烟雾数据集和韩国正常山地与城市风景300张等多样化训练数据进行训练。边缘AI设备在现场CCTV画面中检测到目标后发送至服务器,服务器判断情况并立即向管控系统发送警报。
系统构成
01
YOLO目标识别
从CCTV画面中实时检测火灾、人员和物体,输出边界框和置信度
02
边缘AI推理
在现场边缘设备上实时推理后,将检测结果即时发送至服务器
03
服务器判断
计算是否为真实火灾、火灾蔓延方向、灭火优先级等,并向管控室发送警报
04
多模态分类
AI自动分类云、烟雾、误报等,仅标记真实火灾
05
管控系统
实时视频监控、检测日志、按摄像头设置及管理仪表盘
06
自动再训练
通过定期火灾AI再训练管理误报并提升准确率
模型信息
| 引擎 | YOLO (You Only Look Once) |
| 训练数据 | 烟雾图片5,000张 + 韩国山地与城市正常图片300张 |
| 检测类别 | Fire(火焰)/ Smoke(烟雾)/ Person(人员)/ Object(物体) |
| 推理环境 | NVIDIA Jetson边缘设备(现场)+ GPU服务器(后端双重推理) |
| 管控系统 | 基于Web的实时监控仪表盘 |